El sistema de cámara de visión panorámica (RPO UV2) disponible en una variedad de modelos GM muestra una vista superior del área que rodea el vehículo, junto con las vistas de cámara delantera o trasera, en la pantalla de infoentretenimiento. (Fig. 16) La cámara delantera está en la rejilla o cerca del emblema delantero del vehículo, las cámaras laterales están en la parte inferior de los espejos retrovisores exteriores, y la cámara trasera está arriba de la matrícula.
 Fig. 16
Fig. 16
El sistema de Visión panorámica consiste en los siguientes componentes:
- Cámara de vista trasera B87
- Cámara de vista delantera B174G – Rejilla
- Módulo de control de procesamiento de vídeo K157
- Radio A11 O Módulo de interfaz humano máquina K74
- Cámara de vista latera B225L – Izquierda
- Cámara de vista latera B225R – Derecha
- Receptáculo de tarjeta de memoria X20
Operación del sistema
Cuando el vehículo está viajando en velocidades menores a 6 mph (10 km/h), el Módulo de control de procesamiento de vídeo energizará las cámaras y enviará una señal de vídeo al radio o módulo de interfaz humano máquina. (Fig. 17)
 Fig. 17
Fig. 17
El Módulo de control de procesamiento de vídeo envía voltaje y una tierra constante para energizar las cámaras. Los circuitos de señal de vídeo + y señal de vídeo – llevan la imagen de vídeo desde las cámaras al Módulo de control de procesamiento de vídeo para procesamiento, que entonces enviará la salida de imagen procesada al sistema de infoentretenimiento por los circuitos de señal de vídeo + y señal de vídeo –. Todos los circuitos de señal de vídeo están torcidos y blindados para prevenir cualquier interferencia que puede llevar a una pérdida de resolución de señal de vídeo y causar una imagen de vídeo degradada. Estos circuitos no se deben empalmar/retirar del blindaje o puede ocurrir degradación de la imagen.
El Módulo de control de procesamiento de vídeo recibe información CAN desde el Módulo de detección de objetos de asistencia de estacionamiento trasero y el ángulo del volante desde el Módulo de control de la carrocería mientras el vehículo esté en Reversa.
Diagnóstico
Durante el diagnóstico del sistema de Visión panorámica, pueden haber varios DTC establecidos relacionados con problemas de cableado con la señal de vídeo desde las cámaras al Módulo de control de procesamiento de vídeo o desde el Módulo de control de procesamiento de vídeo al radio. Consulte la siguiente tabla respecto a algunos problemas de señal comunes que puedan aparecer como una pantalla azul o una imagen distorsionada en la pantalla de infoentretenimiento. (Fig. 18)
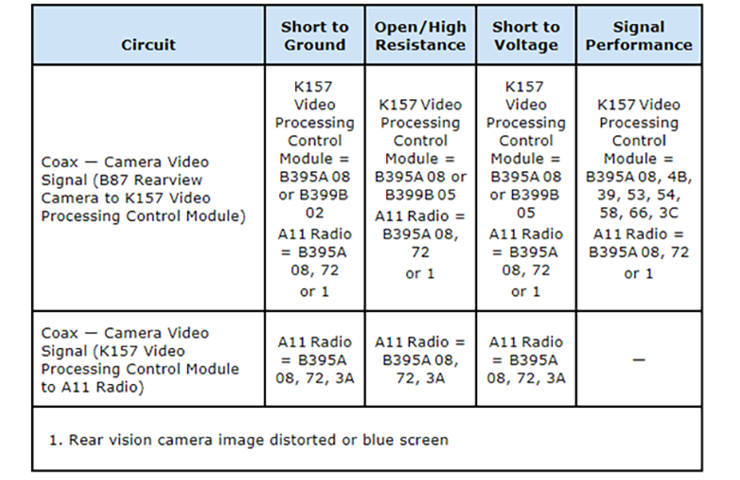 Fig. 18
Fig. 18
Un circuito abierto en el blindaje del circuito de señal de vídeo también puede causar una pantalla distorsionada.
Si el Módulo de control de procesamiento de vídeo no puede calibrar todas las cámaras, la imagen de la cámara puede mostrarse sin líneas de trayectoria proyectadas.
Además, un circuito abierto en el circuito de control de la cámara de reversa, luces de reversa defectuosas, o luces de reversa incorrectas/post-venta pueden causar comportamiento errático del circuito, tal como voltaje indeseado en un circuito cuando el vehículo ya no esté en Reversa. La pantalla de imagen de cámara que permanece activa después que el vehículo se cambia fuera de Reversa también puede indicar posibles problemas del circuito de control de la luz de reversa.
Roce de terminal
Algunas condiciones intermitentes pueden ser causadas por corrosión por roce de la terminal del cable, que es una acumulación de desechos de desgaste oxidados de aislamiento que se pueden formar cuando haya un pequeño movimiento entre los contactos eléctricos. La corrosión por roce puede ser difícil de ver pero parece como pequeñas manchas oscuras en la superficie de contacto de las terminales.
Si la condición es intermitente o no se puede duplicar, desconecte los conectores y agregue rasa dieléctrica o lubricante (Nyogel 760G o equivalente, que cumpla con la especificación GM 9986087) a ambos lados de la terminal. La grasa dieléctrica debe corregir cualquier condición de resistencia alta que se deba a corrosión por roce de la terminal.
Prueba de cable coaxial
El Juego de adaptador de cable COAX FAKRA EL-52552 (Fig. 19) puede ayudar a diagnosticar una variedad de cables coaxiales, incluyendo cables de Wi-Fi, cámaras y antenas.
 Fig. 19
Fig. 19
El Juego EL-52552 cubre todas las configuraciones de cable conocidas equipadas con conectores FAKRA. El uso de adaptadores en el juego permite una conexión a un extremo del conector del cable coaxial (con resistores) y sólo teniendo que probar el otro extremo del conector, a diferencia del método actual de prueba de extremo a extremo al conectar tres o cuatro terminales de prueba DVOM. Los conectores de banana permiten el uso del juego del adaptador de terminal.
El juego se puede usar para probar voltaje a componentes así como para probar los cables coaxiales.
CONSEJO: Antes de probar el cable coaxial, revise el exterior de los cables respecto a estar atrapados, cortados, dañados o tener conexiones sueltas en los componentes, todo esto puede causar problemas de recepción.
Calibración de Módulo de control de procesamiento de vídeo
Si el Módulo de control de procesamiento de vídeo no está calibrado adecuadamente, mostrará un icono de reloj de arena en la pantalla de infoentretenimiento. Una vez que se logre la calibración, el reloj de arena desaparecerá automáticamente.
La calibración es realizada automáticamente por el Módulo de control de procesamiento de vídeo y se necesita que el Módulo de control de procesamiento de vídeo programe las nuevas cámaras y sus posiciones.
Siempre que se reemplacen cámaras en el Sistema de cámara de visión panorámica, la imagen de la cámara se necesita calibrar al sistema. El Módulo de control de procesamiento de vídeo realiza la calibración durante su secuencia de encendido e inicialización en cada ciclo de ignición para maximizar la calidad de la imagen de Visión panorámica.
Si se reemplaza el Módulo de control de procesamiento de vídeo, el nuevo módulo tendrá valores predeterminados integrados para la programación de la cámara. Sin embargo, el Módulo de control de procesamiento de vídeo se calibrará automáticamente para adaptarse al vehículo.
Para permitir que el Módulo de control de procesamiento de vídeo complete la calibración, conduzca el vehículo. Para reducir el tiempo necesario para completar la calibración, el vehículo se debe conducir en una superficie razonablemente plana y recta por lo menos 0.3 millas (0.5 km) a una velocidad de 6–19 mph (10–30 km/h).
– Gracias a Russ Gilbert